
The set point tracking and servo responses are accumulated using NI LabVIEW platform for the comparison of desirable controller. Ziegler Nichol’s (ZN), Tyreus-Luyben (TL) and Internal Model Control (IMC) are PID control settings, calculated and implemented in real time process in the LabVIEW environment through NI ELVIS interface.

Validated model is used for controller design. Process models of flow and level are identified as First order plus dead time models. Level and flow are considered as primary and secondary variable, respectively.
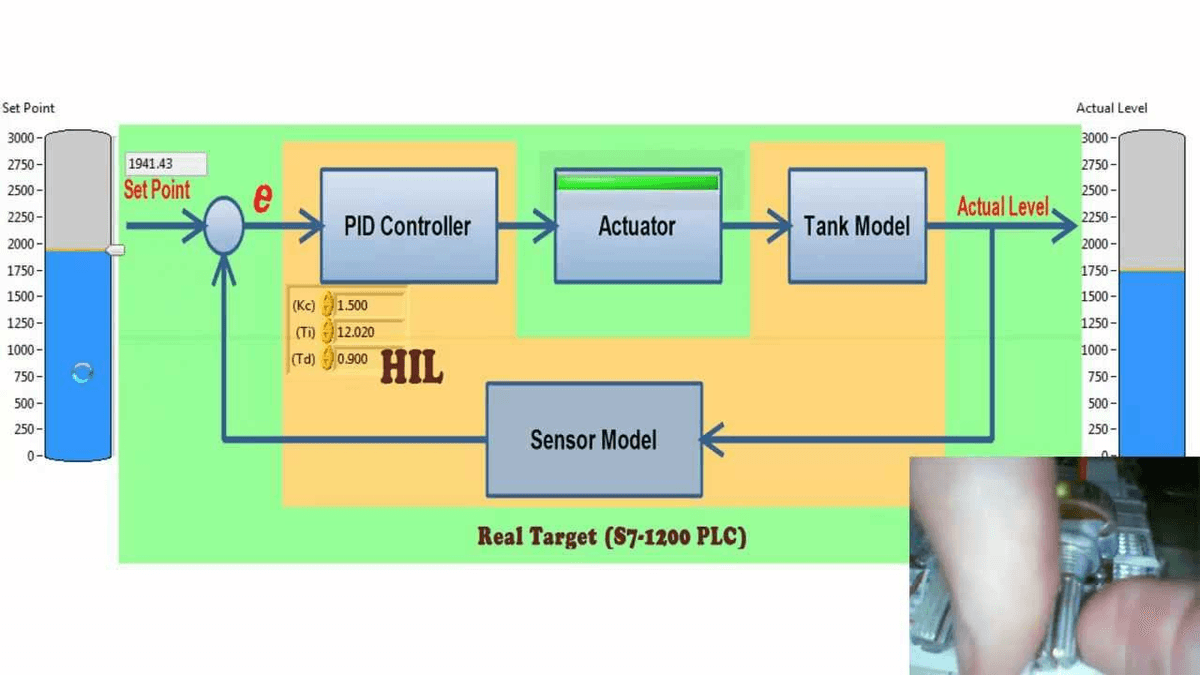
In this work, process variable level is controlled in a cascade mode. The main objective of this work is to enforce PID controller in a real time process, and to find out the best robust control settings for cascade process.